
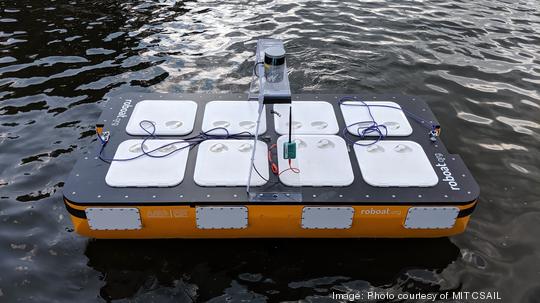
It's two meters long, it drives itself, and is capable of carrying passengers. Meet the "Roboat II," the second iteration of an autonomous boat developed by researchers at MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) and the Amsterdam Institute for Advanced Metropolitan Solutions.
The first Roboat floated onto the scene four years ago — a smaller version of the new Roboat II that MIT CSAIL announced on Monday. The team is now working on another, even larger vessel with the aim of carrying four to six people.
The Roboat II's new software has been optimized for transportation. To pick up a passenger, for example, the boat's system coordinator assigns a nearby, unoccupied boat to pick up that person. Like an Uber or Lyft would on land, the boat generates a path to the passenger based on traffic. Like a self-driving car would on land, it uses LiDAR and GPS sensors along with an inertial measurement unit to avoid obstacles along its way.
“Roboat II navigates autonomously using algorithms similar to those used by self-driving cars, but now adapted for water,” Daniela Rus, MIT professor and CSAIL director and an author on a paper about Roboat, said in a statement. “We’re developing fleets of Roboats that can deliver people and goods, and connect with other Roboats to form a range of autonomous platforms to enable water activities.”
A fleet of Roboats is currently being developed in Amsterdam. In a test, the Roboat II successfully navigated the city's famous canals for three hours, only deviating a maximum of about seven inches from its intended path.
Wei Wang, a senior postdoctoral associate from the MIT Senseable City Lab and CSAIL, co-wrote the paper with Rus and a team of researchers from MIT. Wang also led another, separate team that created a new way for the boats in the autonomous fleet to coordinate.
Wang's team imagined the fleet as a colony of ants. Only one ant — the leader — knows the final destination, and the other ants will follow it where it goes. In the team's "collective transport" model, a user can give instructions to a single robotic boat, and the other boats can estimate its intention and align their movements accordingly. The leader can also steer the team by adjusting its input.
In the future, the team plans to use machine learning to estimate the key parameters of the robots, and to explore adaptive controllers that allow for dynamic change to the structure when objects are placed on the boat.
Eventually, the boats will leave the relative sanctuary of Amsterdam's canals and set sail in outdoor water environments to test their strength against currents and waves.





